7 在线雷达 - 高级主题
7.1 简介
Asensing 雷达可以工作在如下的场景。
单播/组播/广播模式。
运行在VLAN协议上。
向Packet加入用户自己的层。
接入多个雷达。
本文描述在这些场景下如何配置aglidar_sdk。
在阅读本文档之前, 请确保已经阅读过:
7.2 单播、组播、广播
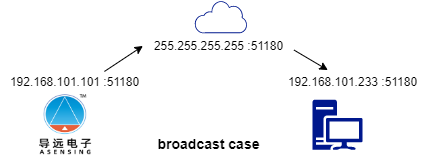
7.2.1 广播
雷达发送 MSOP/DIFOP Packet 到电脑主机。为简单起见,如下的图没有显示 DIFOP 端口。
雷达发送 Packet 到 255.255.255.255:51180,aglidar_sdk 绑定到主机的端口 51180。
如下是配置 config.yaml 的方式。
common:
msg_source: 1
send_point_cloud_ros: true
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
ros:
ros_frame_id: aglidar
ros_send_point_cloud_topic: /aglidar_points
这里列出了 common 部分和 lidar-ros 部分的设置。这两部分设置将在本文中后面的例子沿用,不再列出。
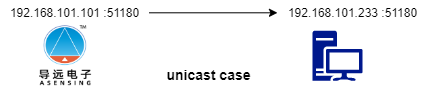
7.2.2 单播
为了减少网络负载,建议雷达使用单播模式。
雷达发送Packet到 192.168.101.233:51180,aglidar_sdk 绑定端口 51180。
如下是配置 config.yaml 的方式。这实际上与广播的方式一样。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
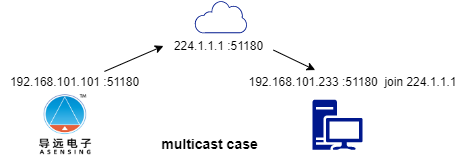
7.2.3 组播
雷达也可以工作在组播模式。
雷达发送 Packet 到
224.1.1.1:51180aglidar_sdk 绑定到端口 51180。同时它将 IP 地址为
192.168.101.233的本地网络接口加入组播组224.1.1.1。
如下是配置 config.yaml 的方式。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
group_address: 224.1.1.1
host_address: 192.168.101.233
7.3 多个雷达的情况
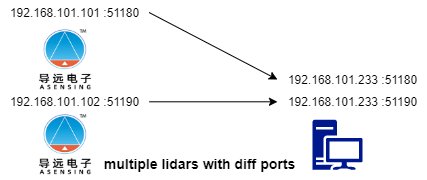
7.3.1 不同的目标端口
如果有两个或多个雷达,首选的配置是让它们有不同的目标端口。
第一个雷达发送 Packet 到
192.168.101.233:51180,给 aglidar_sdk 配置的第一个 driver 节点绑定到 51180。第二个雷达发送 Packet 到
192.168.101.233:51190,给 aglidar_sdk 配置的第二个 driver 节点绑定到 51190。
如下是配置 config.yaml 的方式。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
- driver:
lidar_type: A0
msop_port: 51190
difop_port: 6688
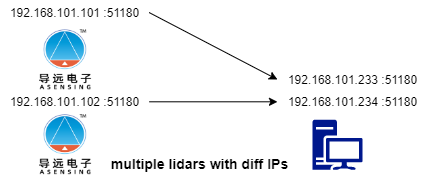
7.3.2 不同的目标 IP
也可以让多个雷达使用不同的目标 IP。
主机有两个网卡, IP 地址分别为
192.168.101.233和192.168.101.234。第一个雷达发送 Packet 到
192.168.101.233:51180, 给 aglidar_sdk 配置的第一个 driver 节点绑定到192.168.101.233:51180。第二个雷达发送 Packet 到
192.168.101.234:51180, 给 aglidar_sdk 配置的第二个 driver 节点绑定到192.168.101.234:51180。
如下是配置 config.yaml 的方式。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
host_address: 192.168.101.233
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
host_address: 192.168.101.234
7.4 VLAN
在某些场景下,雷达工作在 VLAN 层之上。MSOP/DIFOP Packet 有 VLAN 层,如下图。
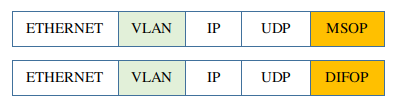
aglidar_sdk 不能解析 VLAN 层。
需要一个虚拟网卡来剥除掉这一层。举例如下。
雷达工作在 VLAN id 为
80的 VLAN 层上。它发送 Packet 到192.168.101.233:51180,Packet 有 VLAN 层。假设主机上有一个支持 VLAN 的物理网卡
eno1。它接收带 VLAN 层的 Packet。
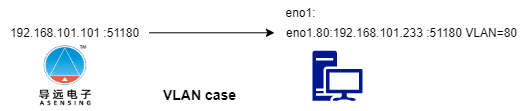
要剥离 VLAN 层,需要基于 eno1,创建一个虚拟网卡 eno1.80, 并且将它的 IP 设置为 192.168.101.233。
sudo apt-get install vlan -y
sudo modprobe 8021q
sudo vconfig add eno1 80
sudo ifconfig eno1.80 192.168.101.233 up
现在,aglidar_sdk 可以将 eno1.80 当做一个一般的网卡来处理,从这里接收不带 VLAN 层的 Packet。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
7.5 User Layer, Tail Layer
在某些场景下,用户可能在 MSOP/DIFOP 数据前后加入自己的层。
在前面的是 USER_LAYER,在后面的是 TAIL_LAYER。

这两个层是 UDP 数据的一部分,所以 aglidar_sdk 可以自己剥除它们。只需要指出这两个层的长度就可以了。
在下面的例子中,USER_LAYER 是 8 字节,TAIL_LAYER 是 4 字节。
lidar:
- driver:
lidar_type: A0
msop_port: 51180
difop_port: 7788
user_layer_bytes: 8
tail_layer_bytes: 4