激光雷达(LiDAR)技术方案

激光雷达分类
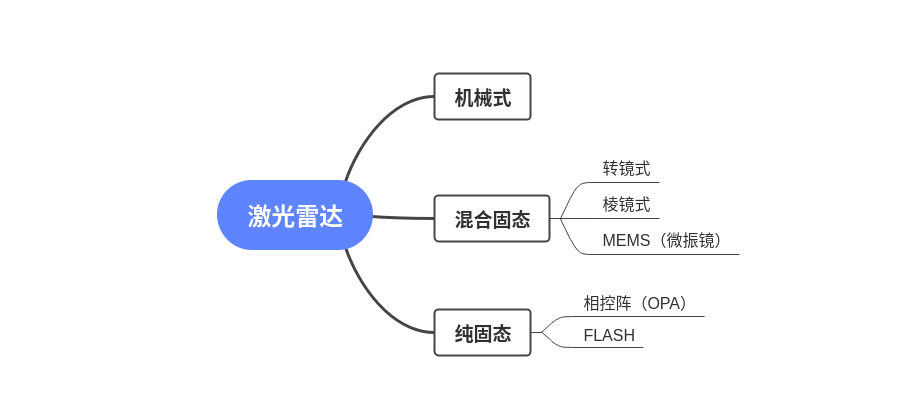
根据扫描模块结构划分,激光雷达可大致分为:机械式(Mechanical Lidar)、半固态、固态(Solid-State Lidar)三种。机械式指整体 360° 旋转;半固态式指收发模块静止,仅扫描器发生机械运动;固态式指无任何机械运动部件。

机械式激光雷达,是最早进入市场、最成熟的一种技术路线。它是指的在垂直方向上排布多束激光器、通过电机带动光电结构 360°旋转,从而化点为线形成三维点云的方案,其线数与分辨率成正比,具有高分辨率、高测距的特点。
半固态激光雷达,因为可转动的部位更少,也就越稳定,制造成本越低。比如转镜方案中,它的收发模块保持不动,电机在带动转镜运动的过程中将光束反射至空间的一定范围,从而实现扫描探测。而微振镜方案,则采用高速振动的二维 MEMS 微振镜实现对空间一定范围的扫描测量。
Flash、OPA 等纯固态激光雷达设计中没有任何运动部件,理论上体积可缩到所有方案中最小,一直被认为是车载激光雷达的终极形态。
国内主机厂选择上车的激光雷达主要采用混合固态(包括转镜、棱镜、MEMS)方案。究其原因主要有两点:
- 一是,混合固态较机械式激光雷达更易降低成本,同时与纯固态(OPA、Flash)相比,技术相对成熟,更易实现商业化落地。
- 二是,转镜方案(法雷奥为代表)是第一个过车规、成本可控,可满足车企性能要求,且实现批量供货的技术方案。
小鹏 P5 搭载的 2 颗激光雷达(安装在前保险杠两侧),来自大疆 Livox 定制版车规级 Horiz 浩界,采用双棱镜扫描方案,最大探测距离为 150m(@10%反射率),横向视场角 120 度,角分辨率为 0.16°*0.2°,点云密度等效于 144 线激光雷达。
技术路线
机械式激光雷达
高线数机械式方案
通过电机带动光机结构整体旋转的机械式激光雷达是激光雷达经典的技术架构,其技术发展的创新点体现在系统通道数目的增加、测距范围的拓展、空间角度分辨率的提高、系统集成度与可靠性的提升等。
半固态式激光雷达
转镜方案
转镜方案中收发模块保持不动,电机在带动转镜运动的过程中将光束反射至空间的一定范围,从而实现扫描探测。转镜也是较为成熟的激光雷达技术方案,其技术创新体现之处与高线数机械式方案类似。
微振镜方案
微振镜方案采用高速振动的二维振镜实现对空间一定范围的扫描测量。微振镜方案的技术创新体现在开发口径更大、频率更高、可靠性更好的振镜,以适用于激光雷达的技术方案。
固态式激光雷达
OPA 方案
OPA 即光学相控阵技术,通过施加电压调节每个相控单元的相位关系,利用相干原理,实现发射光束的偏转,从而完成系统对空间一定范围的扫描测量。OPA 技术取消了机械运动部件,是纯固态式激光雷达的一种发展方向。
电子扫描方案
电子扫描方案中按照时间顺序通过依次驱动不同视场的收发单元实现扫描,系统内没有机械运动部件,是纯固态激光雷达的一种发展方向。其架构比整体曝光所有收发单元的 Flash 固态式激光雷达更先进。
FMCW 激光雷达
连续波调频方案
FMCW 激光雷达发射调频连续激光,通过回波信号与参考光进行相干拍频得到频率差,从而间接获得飞行时间反推目标物距离,同时也能够根据多普勒频移信息直接测量目标物的速度,其技术发展方向为利用硅基光电子技术实现激光雷达系统的芯片化。
激光雷达分类
根据有无机械部件来分,激光雷达可分为机械激光雷达和固态激光雷达。其中,机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则无需机械旋转部件,主要依靠电子部件来控制激光发射角度。固态激光雷达被认为是未来的大势所趋,但目前占据主流地位的仍然是机械激光雷达。
- 机械激光雷达主要由光电二极管、MEMS 反射镜、激光发射接受装置等组成,其中机械旋转部件是指可 360° 控制激光发射角度的 MEMS 发射镜。
- 固态激光雷达则与机械激光雷达不同,它通过光学相控阵列(Optical Phased Array,OPA)、光子集成电路(Photonic IC)以及远场辐射方向图(Far Field Radiation Pattern)等电子部件代替机械旋转部件实现发射激光角度的调整。
由于内部结构有所差别,两种激光雷达的大小也不尽相同,机械激光雷达体积更大,总体来说价格更为昂贵,但测量精度相对��较高。而固态激光雷达尺寸较小,成本低,但测量精度相对会低一些。
此外,相比固态激光雷达,机械激光雷达有一个更为明显的优势就是其 360° 视场,可以在机器人或汽车的顶部固定安装一个激光雷达,便可360°感知周围环境。反观固态激光雷达,需要固定在某些适当的位置,视场角一般在 120° 以内。因此,如应用于无人车中,至少需要用到 4 台才能达到机械式激光雷达一样的覆盖范围,数量越多,也意味着成本越高。
固态激光雷达还有另一个不大明显的优势,人眼安全法规允许运动的激光源发射比固定激光源更高的功率。所有1级安全系统的设计必须确保人员不眨眼直视激光设备数秒钟,仍然不会受到伤害。
固态激光雷达
目前,固态激光雷达的实现方式有微机电系统(MEMS)、面阵闪光(Flash)技术和光学相控阵(OPA)技术。
- MEMS 采用微扫描振镜结构进行激光束偏转,但是扫描范围受限于振镜的偏转范围。
- Flash 技术采用类似照相机的工作模式,感光元件的每个像素点可以记录光子飞行的时间信息,由此能够输出具有深度信息的“三维”图像,但该技术视场角(FOV)受限,扫描速率较低。
- OPA 扫描技术是基于微波相控阵列扫描理论和技术发展起来的新型光束指向控制技术,具有无惯性器件、精确稳定、方向可任意控制等优点。其工作原理为:激光器功率均分到多路相位调制器阵列,光场通过光学天线发射,在空间远场相干叠加形成一个具有较强能量的光束;经过特定相位调制后在光场的发射天线端产生波前的倾斜,从而在远场反映成光束的偏转,通过施加不同相位,可以获得不同角度的光束形成扫描的效果,无须机械扫描。
固态技术的紧凑芯片特性使得 LiDAR 不仅更坚固,而且还有助于节省扫描仪内的结构空间,使扫描仪达到极小的尺寸并降低成本。由于体积小,固态激光雷达可以集成到车辆、基础设施和建筑结构中。特别是在汽车领域,“得固态 LiDAR 者,得自动驾驶天下”已成为行业共识,为汽车 LiDAR 传感器提供同时具有美观和鲁棒性的解决方案。
我国的 镭神智能、北科天绘、速腾聚创、禾赛科技 等已经开始在 MEMS 激光雷达领域展开研究,但仍未大规模商用;LeddarTech、北醒科技、光珀智能、华科博创 等公司在 Flash 激光雷达领域不断推出产品。Quanergy 公司将相控阵列激光雷达引入商业视野,正研发适用于车内传感系统和无人驾驶汽车的全固态激光雷达。
总之,具有大扫描角度、高分辨率等性能的全固态、小型化激光雷达仍然需要进一步的研究。
MEMS 激光雷达
MEMS 激光雷达是一种利用激光实现三维空间成像的传感器,是自动驾驶车辆中最为核心的传感器。它利用 MEMS 微振镜将出射激光在空间中做极快速的扫描,通过测量激光信号从而获得立体空间中的距离信息。MEMS 激光雷达具有高分辨率、车规级可靠性和低成本的特点。

图:Waymo 的测试车激光雷达清洗方式