激光雷达(LiDAR)类型
激光雷达有两种基本类型:机载和陆地。
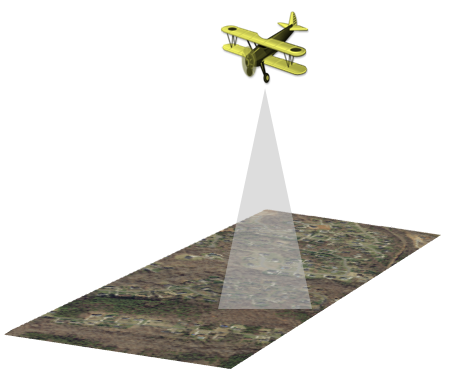
机载
使用机载激光雷达时,系统会安装在定翼机或直升机中。红外线激光将射向地面并返回到移动中的机载激光雷达传感器。有两种类型的机载传感器:地形和深海探测。
地形探测激光雷达
地形探测激光雷达可用于获得可在多种应用场合使用的表面模型,如林业、水文、地貌、城市计划、景观生态、海岸工程、调查评估和体积计算。
深海探测激光雷达
深海探测激光雷达是一种可穿透到水中的机载采集类型。绝大多数深海探测激光雷达系统会同步采集高程和水位信息,这提供了陆地和水域交界面的一种机载激光雷达测量方法。通过深海探测激光雷达测量,红外线(传统激光系统)将从陆地和水面反射回飞机,而其余的绿色激光将穿过水柱。对这两个不同脉冲进行分析所获得的结果可用于构建水深和海岸线高程。深海探测信息对于沿海地区、港口以及海岸和浅滩地带非常重要。深海探测信息还用于定位海底物体。

陆地激光雷达
陆地激光雷达有两种主要类型:移动和静止。在移动采集的情况下,激光雷达系统会安装在移动的车辆上。在静止采集的情况下,激光雷达系统通常会安装在三脚架或固定设备上。这两种激光雷达传感器都由人眼安全激光组成。
陆地激光雷达会采集非常密集和高精度的点,可准确识别物体。比如,这些密集的点云可用来管理设施点、执行高速公路和铁路的测量,甚至为外部和内部空间创建 3D 城市模型。
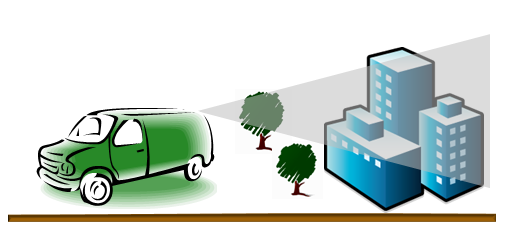
移动
移动激光雷达是通过移动的平台采集的激光雷达点云的集合。移动激光雷达系统可以包含安装在移动车辆上的任何数量的激光雷达传感器。这些系统可安装在车辆、火车甚至轮船上。移动系统通常由激光雷达传感器、相机、GPS(全球定位系统)以及一个 INS(惯性导航系统)组成,跟机载激光雷达系统相似。
移动激光雷达数据可用于分析道路基础设施和定位侵占安全区的高架电线、灯杆以及道路或铁路线附近的路标。
静止
静止激光雷达是通过静止位置采集的激光雷达点云的集合。通常,激光雷达传感器会安装在三脚架上,它是一种完全便携式、基于激光测距的影像系统。这些系统可采集建筑物内部及其外部的激光雷达点云。这种类型的激光雷达一般用于工程、采矿、测量和考古等领域。