激光雷达系统框架
激光雷达,也称为光学雷达(Light Detection And Ranging)是激光探测与测距系统的简称,它通过测定传感器发射器与目标物体之间的传播距离,分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,从而呈现出目标物精确的三维结构信息。
激光雷达具备在各种场景下(高速路、地库、高架桥、隧道、城市街道、港口等)通过数据总线向车辆输出高精度点云信息的能力,激光雷达的系统框图如下图所示。
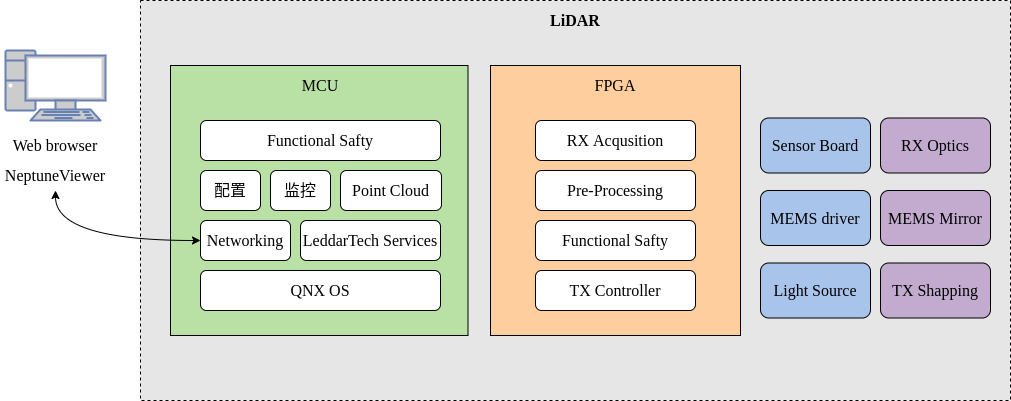
图1:L30激光雷达系统框图
简单来说,激光雷达由激光发射器、光学接收器、信息处理系统 3 部分组成。激光雷达向外界发射激光脉冲,并通过内部旋转装置,对周围环境进行旋转扫描,每一次扫描都可以获得巨量的空间信息点,这些空间信息点的集合就被称作“点云”数据(Point Cloud)。由点云数据构成的三维图也就称作点云图,从而绘制出环境地图,达到环境感知的目的。